There are robots made of crustaceans. The “shells” of crustaceans, called exoskeletons, are usually thrown away after the food processing process. Thanks to the Computational Robot Design and Fabrication Lab (CREATE lab) of the Federal Institute of Technology in Lausanne (EPFL), however, they could have a second life.
In the study “Dead Matter, Living Machines” published in Advanced Science at the end of 2025, the CREATE Lab showed how exoskeletons from disposable scampi could become components of robots capable of swimming, grasping objects and manipulating the environment. The results are very promising: by integrating synthetic components such as “artificial tendons”, silicone covers and motorized bases, an exoskeleton weighing just 3 grams can manipulate objects weighing up to half a kilo, lift different shapes and become the “fin” of a robot capable of swimming at 11 cm per second. However, there is still a long way to go to transform this idea into a technology that can be used on an industrial scale.
Let’s see how the study was structured, what results they obtained and what limitations there still exist.
The study on the integration of scampi exoskeletons into robots
This study fits into the trend of necrobotica field of research that uses parts of dead organisms as robotic components. This approach may seem strange, but it has some important advantages. On the one hand it allows us not to raise the ethical and maintenance problems linked to the use of live organisms in robotics, on the other it allows us to reuse what would have been food waste, such as, in this case, the exoskeletons of scampi.
The CREATE laboratory decided to use scampi exoskeletons both for their incredible availability as food waste and for their structural properties. The abdomen of the Norway lobster (Nephrops norvegicus) has a structure composed of six rigid segments, connected to each other by flexible membranes, which allow very rapid and complex movements. This balance between rigidity and flexibility allows the segments to move almost independently, producing very rapid twists. In nature it is used by scampi to escape predators, but it can prove equally useful in the robotic field.
To make the exoskeletons an effective part of the robotic devices, the team proceeded in this way: after purchasing normal frozen scampi, they defrosted them, separated the tails, cooked them in boiling water for two minutes and emptied them completely. The exoskeletons thus obtained were then “augmented” with synthetic components. In particular, the following have been added:
- artificial tendons in elastic materials, positioned both along the exoskeleton and inside it to control its movement, a bit like the strings of a marionette;
- a layer of protective siliconedesigned to increase the lifespan of biological material.
Everything was finally mounted on different motorized basesdesigned based on the robotic application to be tested.
Bio-hybrid robots can move objects, grasp them and move through water
Using this framework, the team developed three distinct robotic applicationsall starting from a single exoskeleton of just 3 grams:
- Move: Mounted on a robotic arm, the exoskeleton can adapt its grip to objects of different shapes and materials. In tests it managed to move very varied objects: from a 20 gram highlighter to 43 gram rolls of adhesive tape, up to weights of approximately 500 grams.
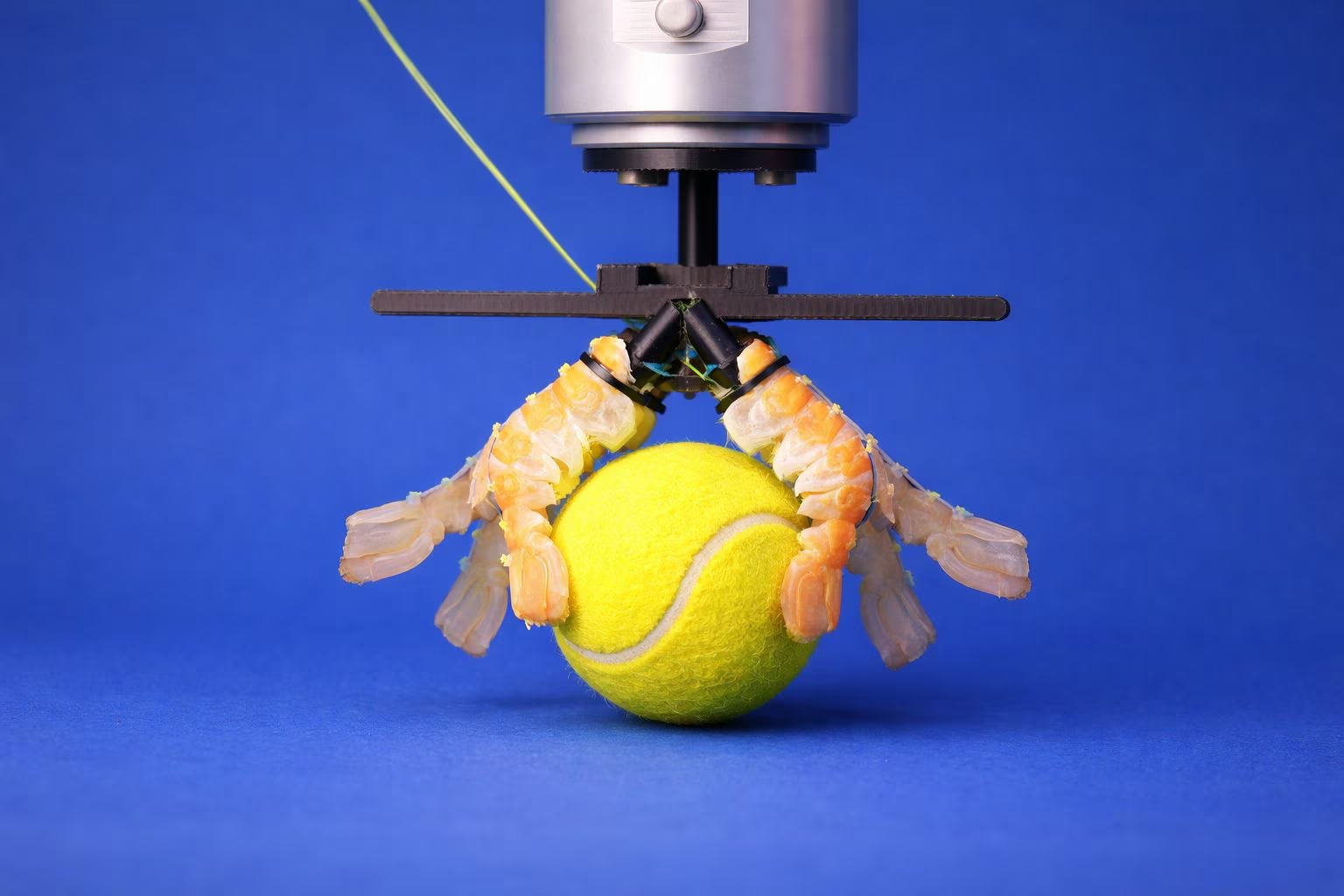
- Grab: Using two exoskeletons mounted a pliersthe team built a system capable of grasping very different objects: a tomato, a marker or an AirPods case. By varying the arrangement of the artificial tendons they also managed to change the type of grip, making it adaptable to irregular shapes.
- Swim: By connecting two exoskeletons to a floating platform as if they were fins, the team created a small robot capable of swimming in a three-meter long tank at the speed of 11 cm per second.
A particularly interesting result concerns the duration of biological components. As you can easily imagine, all the “bio” components of these robots have a limited lifespan, given by natural decomposition. Without any treatment, an exoskeleton is usable for about five hours before drying out and stiffening. With the silicone coating, however, the duration can reach up to almost 40 hoursa remarkable result for this type of hybrid systems.
Once use is finished, the exoskeleton can be disposed of or left to degrade naturally, while the synthetic components are recovered and reused.
The limits of this technology
Despite the promising results, several obstacles remain before systems of this type can be used on a large scale.
The main one concerns the biological variability. Each scampi is different from the others, and therefore each exoskeleton also has small variations in shape and structure. In engineering contexts, however, even minimal differences can compromise the repeatability and precision of performance.
To overcome this limit it will be necessary to develop systems compensation and adaptationcapable of automatically correcting morphological variations between one exoskeleton and another. Further improvements will also be needed durability and resistance of biological components.
Despite these limitations, the head of the research group, Josie Hughes, said she sees interesting prospects:
Even if nature does not necessarily provide the optimal form, it still surpasses many artificial systems and offers valuable insights for the design of functional machines
The next challenge will be to understand which other exoskeletons can be reused with the same approach.









